Mouvement képlérien
En astronomie, plus précisément en mécanique céleste, le mouvement képlérien correspond à une description du mouvement d'un astre par rapport à un autre respectant les trois lois de Kepler. Pour cela il faut que l'interaction entre les deux astres puisse être considérée comme purement newtonienne, c'est-à-dire qu'elle varie en raison inverse du carré de leur distance, et que l'influence de tous les autres astres soit négligée. Il est fréquent que l'un des deux corps (qualifié alors de « central ») soit de masse (beaucoup) plus importante que l'autre, et soit donc dominant gravitationnellement, tel que celui d'une étoile par rapport à l'une de ses planètes, d'une planète par rapport à l'un de ses satellites naturels ou artificiels, etc. Le mouvement képlérien décrit alors le mouvement du corps relativement moins massif.
Le mouvement képlérien est en fait un cas particulier du problème à deux corps, dans le cas d'une force variant comme l'inverse du carré de la distance, ce qui correspond à la force d'interaction gravitationnelle entre les deux corps, s'ils sont supposés ponctuels ou encore à symétrie sphérique [N 1], et constituant un système isolé[1]. Or le problème à deux corps peut toujours être ramené à celui du mouvement d'une particule (dite fictive) dans le référentiel du centre de masse des deux corps, les trajectoires des corps « réels » étant homothétiques de celles de cette particule fictive.
Dans le cas du champ de gravitation « newtonien », l'étude du mouvement de ce corps fictif dans le champ de gravitation « créé » par un centre fixe à l'origine est appelé problème de Kepler[2],[3] et le mouvement résultant est précisément le mouvement képlérien[2]. Il est intéressant de noter qu'en dépit de ces appellations, Kepler ne formula pas ainsi la situation, mais déduisit ses lois du mouvement des planètes en utilisant les observations réalisées par Tycho Brahe, notamment sur le mouvement de la planète Mars, alors que ni la loi de la gravitation universelle ni le principe fondamental de la dynamique n'avaient encore été découverts. De fait, ce problème dit de Kepler n'a été formulé correctement qu'avec Newton, sous une forme géométrique[4].
Il est alors possible de montrer que les trajectoires des corps célestes sont des coniques, en particulier des ellipses[N 2], ce dernier cas très important étant souvent désigné sous le nom d'orbite de Kepler. Dans le cas fréquent où l'un des deux corps est de masse beaucoup plus importante que l'autre, il peut être considéré comme immobile à l'un des foyers de la conique, qui représente alors la trajectoire du corps « périphérique ».
Comme tout modèle, le problème de Kepler correspond bien sûr à une situation idéalisée, puisque l'influence de tous les autres corps célestes est négligée, tout comme les déviations au caractère non-newtonien de la force de gravitation[N 3]. Toutefois cette approximation est souvent vérifiée avec une très bonne approximation dans de nombreux cas. Ainsi dans le Système solaire le Soleil, qui concentre 99,86 % de la masse totale du système, domine gravitationnellement tous les autres corps. Il est donc possible de considérer avec une bonne approximation le mouvement de chaque planète ou de tout autre corps du système comme képlérien. L'influence des autres corps peut ensuite être prise en compte comme des perturbations de l'orbite képlérienne[N 4], celle-ci constituant ainsi « l'orbite de base » à partir de laquelle il est possible de construire par approximations successives l'orbite « réelle » du corps céleste considéré. Par suite, l'étude du mouvement képlérien est d'une importance capitale en mécanique céleste.
-

Les planètes telluriques, de gauche à droite :
Mercure, Vénus, Terre, Mars

Aspects historiques
De nombreux modèles furent proposés durant l'Antiquité pour représenter les mouvements des planètes[N 5]. Ces modèles sont à la fois des « cosmologies », c'est-à-dire des « représentations du monde » (ou de l'Univers, ou du κόσμος, kósmos, « monde ordonné » des Grecs[5]) et des tentatives de comprendre et de prévoir les phénomènes astronomiques, notamment pour déterminer les dates des éclipses ou la construction des calendriers. Tous ces systèmes sont géocentriques, c'est-à-dire qu'ils placent la Terre au centre de l'Univers. La seule exception, qui n'aura aucune postérité immédiate, est le modèle héliocentrique d'Aristarque de Samos, proposé vers -280.

Selon Simplicius (fin Ve siècle - début VIe siècle apr. J.-C.)[6] c'est Platon (427-327 av. J.-C.) qui aurait proposé à son élève Eudoxe de Cnide (408-355 av. J.-C.) d'étudier le mouvement des planètes en n'utilisant que des mouvements circulaires et uniformes, considérés comme parfaits [7].


La difficulté de décrire précisément les mouvements des planètes, notamment les phénomènes de rétrogradation, conduit à des représentations complexes. Les connaissances astronomiques du monde gréco-romain sont résumées au IIe siècle de notre ère par Ptolémée (vers 90 - 168 ap. JC), dans un ouvrage en Grec transmis par les Arabes sous le nom de l'Almageste[N 6] Connu sous le nom de modèle de Ptolémée, la représentation du système solaire et du mouvement des planètes (ainsi que de la Lune et du Soleil) utilise comme ses prédécesseurs un modèle géocentrique, et un système élaboré de sphères en rotation circulaire et uniforme, les épicycles et déférents, introduit par Hipparque (IIe siècle av. J.-C.), qu'il perfectionne en introduisant la notion d'équant, qui est un point distinct du centre du cercle déférent par rapport auquel une planète, ou le centre d'un épicycle, se déplace à vitesse uniforme.
Le système de Ptolémée va dominer l'astronomie pendant quatorze siècles. Il donne des résultats satisfaisants malgré sa complexité, au besoin en modifiant et raffinant le modèle des épicycles, déférents, et points équants. Considéré comme compatible avec la philosophie d'Aristote, le géocentrisme devient doctrine officielle de l’Église en Europe au cours du Moyen Âge.

On doit à Nicolas Copernic (1473-1543) la remise en cause du dogme géocentrique. Il publie en 1543, l'année de sa mort, son ouvrage majeur De revolutionibus Orbium Coelestium où il propose un système héliocentrique, dans lequel les planètes et la Terre se déplacent selon des orbites circulaires, parcourues à vitesses constantes, la Lune étant le seul astre tournant autour de la Terre. Bien qu'imparfaite, cette vision s'avère très féconde : les mouvements des planètes sont plus simples à décrire dans un référentiel héliocentrique[7]. L'ensemble des irrégularités de mouvements telles que les rétrogradations s'explique uniquement par le mouvement de la Terre sur son orbite, plus précisément en termes modernes par l'effet du passage du référentiel héliocentrique au référentiel géocentrique. Le système de Copernic permet également de supposer que les étoiles de la « sphère des fixes » sont à une distance bien plus grande de la Terre (et du Soleil) que l'on le supposait jusqu'alors, pour expliquer l'absence d'effet observé alors (parallaxe) du mouvement de la Terre sur la position des étoiles. Il est à noter qu'initialement le système de Copernic, qui sur la pratique astronomique consistait à échanger les positions de la Terre et du Soleil, ne suscita pas une opposition de principe de l’Église, jusqu'à ce que celle-ci s'aperçut que ce modèle remettait en cause la philosophie d'Aristote[7].

Johannes Kepler (1571-1630) perfectionnera ce modèle, grâce à l'analyse soigneuse des observations précises de son maître Tycho Brahe (1541-1601), notamment concernant le mouvement de la planète Mars publie ses trois célèbres lois (Cf. Lois de Kepler) en 1609, 1611, 1618[7] :
- première loi : « Les planètes décrivent des ellipses dont le Soleil occupe l'un des foyers. »
- deuxième loi : « Le rayon vecteur reliant le centre de la planète au foyer décrit des aires égales en des temps égaux. »
- troisième loi : « Les cubes des demi-grands axes des orbites sont proportionnels au carré des périodes de révolution. »
Le modèle de Kepler est d'une importance capitale en astronomie : il rompt avec le dogme géocentrique, mais également avec celui de l'utilisation du mouvement circulaire et uniforme pour décrire le mouvement des planètes, car non seulement les orbites ne sont plus des cercles, mais la deuxième loi implique que les vitesses de révolution sur celles-ci ne sont plus constantes, les planètes devant se mouvoir plus rapidement au voisinage de leur passage au plus près du foyer (le périastre) qu'à celui du point le plus éloigné (l'apoastre).
Isaac Newton (1642-1727), démontre ces lois empiriques en 1687 (voir Philosophiae Naturalis Principia Mathematica ; Démonstration des lois de Kepler), en proposant une loi de la gravitation dite universelle, car s'appliquant aussi bien pour les mouvements des planètes que pour l'explication de la chute d'un corps sur la Terre. Ceci marque le début d'une nouvelle ère : la mécanique céleste et la mécanique classique fondées sur le calcul infinitésimal.
Dans sa théorie, Newton utilise la notion controversée d'action instantanée à distance : la gravitation agit instantanément en 1/r². C'est le célèbre « hypotheses non fingo ». La « résistance cartésienne », plus la très grande difficulté mathématique des Principia provoquera un temps de réception assez long de son œuvre, et il faudra attendre les ouvrages d'Euler, de McLaurin et de Clairaut, pour éclaircir la situation. Néanmoins les plus grands esprits de l'époque (Huygens, Leibniz, etc.) reconnaissent immédiatement la portée des Principia.
La constante de gravitation sera évaluée par Cavendish en 1785 : G = 6,674 × 10−11 N m2 kg−2. Il convient de noter que la valeur de cette constante tout comme celle de la masse M de nombreux objet du système solaire, n'est connue qu'avec une assez faible précision, alors que les valeurs de μ = GM, appelé paramètre gravitationnel standard sont souvent déterminées avec une grande précision. Ainsi pour la Terre GM = 398 600,441 8 ± 0,000 8 km3 s−2, soit une précision de 1 pour 500 000 000 alors que M = 5,973 6 × 1024 kg, soit une précision de l'ordre de 1 pour 7 000.
Orbites et lois de Kepler
Résultats généraux du problème à deux corps
Notion de particule fictive
Le mouvement képlérien est un cas particulier important d'une situation générale dans lequel deux corps, considérés comme ponctuels[N 1] et formant un système isolé[N 7], sont en interaction gravitationnelle mutuelle[N 8]. Il est alors possible (cf. article détaillé) de montrer que ce problème général peut toujours être ramené à celui du mouvement d'un seul corps, dénommé particule fictive, affecté de la masse , appelée masse réduite[N 9], se déplaçant dans le champ de gravitation créé à l'origine par un corps ponctuel immobile affecté de la masse totale du système [2], à condition de se placer dans le référentiel du centre de masse des deux corps (référentiel barycentrique). Les orbites réelles de chacun des corps célestes dans ce référentiel sont alors homothétiques de celle de cette particule fictive.

Le problème de Kepler correspond simplement au cas où ce champ de gravitation est de type « newtonien », c'est-à-dire variant comme l'inverse du carré de la distance[2]. Les résultats généraux de l'étude du problème à deux corps permettent de préciser les caractéristiques des trajectoires possibles, le champ newtonien possédant une constante du mouvement spécifique qui permet d'obtenir aisément l'équation polaire des orbites correspondantes.
Propriétés générales du mouvement
La résolution du problème de Kepler se ramène donc à résoudre l'équation du mouvement de la particule fictive P dans le champ de gravitation « causé » par le centre de force, (affecté de la masse totale M du système), donnée par l'application du principe fondamental de la dynamique, soit après réarrangement des termes :

avec et , appelé paramètre gravitationnel standard (M étant la masse totale du système).


Le caractère central de la force implique la conservation du moment cinétique de la particule fictive (voir aussi Moment cinétique spécifique), ce qui a deux conséquences :
- planéité des orbites, du fait que le rayon-vecteur et le vecteur vitesse de la particule sont à tout instant orthogonaux à un vecteur de direction constante ;
- que le mouvement vérifie la loi des aires [1],[2],[3], aussi connue sous le nom de deuxième loi de Kepler (1611): « Le rayon vecteur reliant le centre de la planète au foyer décrit des aires égales en des temps égaux. ».


De façon plus précise, si désigne l'aire élémentaire balayée pendant dt par le rayon vecteur, cette loi implique que la vitesse aréolaire du corps est constante, avec , où .




Ces propriétés sont générales pour le problème à deux corps, quelle que soit la forme du potentiel d'interaction entre les deux corps. Elles sont valables que le corps possède ou non une trajectoire fermée, ou qu'il puisse ou non aller à l'infini.
Orbites de Kepler

Dans le cas du problème de Kepler, il existe une constante du mouvement spécifique, appelée vecteur de Runge-Lenz, ou encore (sous forme adimensionnelle) vecteur excentricité[2] :
- où .


La projection de cette grandeur vectorielle, contenue dans le plan de l'orbite, sur le rayon vecteur permet d'obtenir aussitôt l'équation de la trajectoire en coordonnées polaires :
- ,

qui est celle d'une conique, avec :
- angle polaire entre et , appelé anomalie vraie ;
- , excentricité de l'orbite ;
- , paramètre de l'orbite.




La forme de l'orbite correspondante dépend de la valeur de l'excentricité e, qui elle-même dépend de l'énergie mécanique H du système (par nature conservatif), puisqu'il est possible d'établir la relation[2] :
- (C étant la constante des aires, m la masse réduite du système, toutes deux définies plus haut).

Il est possible de distinguer les cas suivants (cf. figure ci-contre) :
- e > 1 : orbite (ou plutôt trajectoire) hyperbolique. Physiquement ce cas correspond à H > 0, et implique que le corps peut aller en l'infini avec une vitesse (donc une énergie cinétique) non nulle, l'énergie potentielle de gravitation tendant vers zéro dans cette limite ;
- e = 1 : trajectoire parabolique. Il s'agit du cas limite ou H = 0, le corps peut donc aller en l'infini, mais avec une vitesse nulle ;
- 0 < e < 1 : orbite elliptique (dite de Kepler). Dans ce cas H <0, telle que pour que la relation précédente entre e et H ait un sens physique ;

- e = 0 : orbite circulaire, cas limite du précédent où .

Le cas de l'orbite elliptique (et à la limite, circulaire) correspond à la première loi de Kepler (1609), qui s'énonce originellement : « Les planètes décrivent des ellipses dont le Soleil occupe l'un des foyers. ». De façon plus rigoureuse, l'un des foyers de l'orbite est occupé par le centre de masse du système, qui pour les planètes du Système solaire est pratiquement confondu avec le centre du Soleil[N 10].
Dans tous les cas, le vecteur excentricité est dirigé vers le point d'approche minimale entre l'un des foyers (en pratique, l'astre « central », de masse dominante) et la particule fictive (en pratique, le corps « en orbite » autour du corps « central »), appelé périapse (ou périastre)[N 11]. La distance correspondante est .

Du fait de la loi des aires, la vitesse du corps céleste sur son orbite n'est pas constante (sauf si le mouvement est circulaire). Il est facile de voir par exemple dans le cas d'une orbite elliptique que la vitesse du corps devra être plus rapide au périastre qu'à l'apoastre, pour que le rayon vecteur puisse balayer des aires égales en des temps égaux.
Remarques :
- L'existence du vecteur excentricité comme intégrale première, en plus du moment cinétique ou de l'énergie totale, est spécifique au problème de Kepler, plus précisément à la dépendance en du potentiel d'interaction gravitationnelle. Comme il est souligné dans l'article relatif au problème à deux corps ou au vecteur excentricité, ceci implique de par le théorème de Noether que le problème de Kepler possède une symétrie additionnelle. En effet, la conservation du moment cinétique est liée à l'invariance par rotation du problème à deux corps[8], tandis que celle de l'énergie totale est liée à l'invariance par translation dans le temps[8]. La symétrie associée au vecteur excentricité est plus complexe, car elle ne s'interprète correctement qu'en dimension 4[9].
- Le fait que les orbites de Kepler dans le cas lié soient fermées est également spécifique du mouvement képlérien, n'étant absolument pas valable pour un problème à deux corps où le potentiel d'interaction U(r) est quelconque, mais uniquement pour le potentiel newtonien en 1/r ou le potentiel harmonique isotrope en r2 (théorème de Bertrand).
- L'importance du vecteur excentricité fut soulignée par Hermann (1710 & 1713), redécouverte par Laplace, puis réutilisée par Runge et Lenz (Cf. vecteur de Runge-Lenz).

Cas de l'orbite elliptique

Dans le cas de l'orbite de Kepler elliptique, est dirigé selon le grand axe de l'orbite, et il existe un point d'éloignement maximal entre le foyer « centre » et le corps céleste (en toute rigueur la particule fictive), appelé apoastre, qui correspond à θ=π, soit . Le paramètre p de l'ellipse correspond à la distance entre le foyer et le corps en orbite quand celui-ci est en quadrature (θ=±π/2). L'ellipse possède deux foyers symétriques, par rapport à son centre C, son petit axe étant perpendiculaire au grand axe en ce point.

Il est possible de définir les grandeurs caractéristiques suivantes (cf. l'article Ellipse) :
- demi-grand axe a : il correspond au « rayon » de l'orbite, et est égal à la moitié de la longueur du grand axe. Il est facile de vérifier les relations :
- , , ;



- demi-petit axe b : moins important que le précédent, il lui est lié par la relation , par ailleurs , ce qui donne également la relation entre a, p et b : ;
- la distance du foyer au centre, notée c, donnée par la relation , il est facile de vérifier également que .





Dans le cas limite de l'orbite circulaire de rayon R et de centre O, e = 0, et donc a=b=p=R, c = 0, le point C et les foyers F et F' sont confondus avec O.
Pour les huit planètes du Système solaire, il est possible de considérer avec une bonne approximation que le Soleil en raison de sa masse est immobile au foyer de chacune des orbites, lesquelles sont pour la plupart quasi circulaires vu les faibles excentricités, sauf pour Mercure (e=0,206).
Troisième loi de Kepler
L'orbite elliptique est fermée, par suite le mouvement de l'astre sur celle-ci est périodique, de période T appelée période de révolution. Durant une période, le rayon-vecteur balaie la totalité de l'aire de l'ellipse, soit . Or du fait de la constance de la vitesse aréolaire (deuxième loi de Kepler), avec , cette aire est également égale à , ce qui donne en utilisant la relation avec :




- , soit encore .


Finalement il vient une relation entre le carré de la période de révolution et le cube du demi-grand axe de l'orbite de Kepler :
- ,

qui correspond à la troisième loi de Kepler (1618) :« Les cubes des demi-grands axes des orbites sont proportionnels au carré des périodes de révolution. ».
Cette loi, spécifique au mouvement képlérien, est d'une importance considérable : il est en effet facile de déterminer par des observations la période de révolution d'un astre tel qu'une planète ou un satellite. Il est alors possible d'en déduire la valeur du demi-grand axe de l'orbite, ainsi que celle de .
Description des orbites de Kepler - Équation de Kepler
Si les résultats de l'étude du problème de Kepler permettent de connaître la forme des orbites possibles, ils ne sont pas directement applicables en astronomie. En premier lieu, il faut pouvoir repérer dans l'espace l'orbite du corps céleste considéré, en relation avec un plan de référence, en général l'écliptique, qui est le plan de l'orbite terrestre. Les paramètres qui permettent de le faire sont appelés les éléments d'orbite ou éléments orbitaux, dont la détermination résulte des observations. En second lieu, une fois ces éléments d'orbite connus, il faut disposer d'une relation donnant la position de l'astre au cours du temps sur cette orbite, ce qui permettra notamment de déterminer les éphémérides du corps céleste considéré. C'est l'équation de Kepler qui permet d'obtenir une telle relation entre position de l'astre sur son orbite et temps.
Dans la suite, seul le cas de l'orbite de Kepler elliptique est considéré.
Éléments d'orbite
Il a été indiqué que dans le cas du mouvement képlérien le problème à deux corps possède trois intégrales premières, dont deux vectorielles (, lié au moment cinétique, et ), et une scalaire (H, l'énergie totale), ce qui fait au total 6 constantes scalaires[N 12].

Toutefois de par la relation entre les valeurs de ces intégrales premières, une orbite de Kepler donnée (quelle que soit sa forme) est caractérisée par seulement 5 grandeurs scalaires indépendantes, qui peuvent être choisies comme étant[2],[N 13]:

- les trois composantes de (qui définissent l'orientation dans l'espace du plan de l'orbite) et les deux de (qui définissent l'orientation de l'orbite dans ce plan);
- les trois composantes de , la valeur de H (liée à celle de e et de a, donc définissant la forme de l'orbite), et un angle donnant la direction du périapse dans le plan orbital;
- ou encore deux angles repérant la direction de , la valeur du demi-grand axe a, celle de l'excentricité e, un angle déterminant la direction du périapse dans le plan orbital…
Ces différentes possibilités sont à la base de la détermination des éléments d'orbite, ensemble de 5 données géométriques permettant de caractériser une orbite donnée. En effet, la détermination de l'orbite d'un corps céleste donné résulte des observations et mesures réalisées.
En pratique les éléments d'orbite sont donnés par les deux valeurs du demi-grand axe a et de l'excentricité e, ainsi que de trois angles définis sur la figure ci-après[10]:
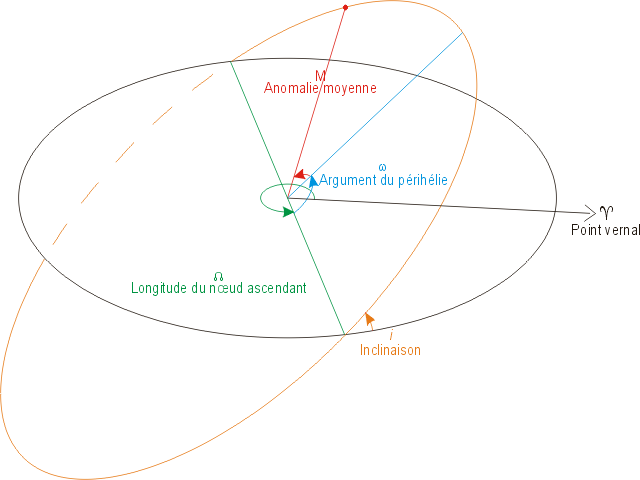
- l'inclinaison i (entre 0 et 180 degrés) est l'angle que fait le plan orbital avec un plan de référence, qui pour les orbites planétaires dans le système solaire est en général le plan de l'écliptique, c'est-à-dire le plan de l'orbite terrestre;
- la longitude du nœud ascendant Ω: il s'agit de l'angle entre la direction du point vernal (position du soleil lors de l'équinoxe de printemps[N 14]) et la ligne des nœuds, c'est-à-dire de l'intersection entre le plan de l'orbite considéré et du plan de référence, le nœud ascendant étant le point où le corps céleste passe au nord du plan de référence.
- l'argument du périastre ω: il s'agit de l'angle formé par la ligne des nœuds et la direction du périastre, dans le plan orbital.
Les deux premiers de ces angles permettent de fixer la position du plan de l'orbite dans l'espace, par rapport au plan de référence, le dernier angle permettant d'en préciser l'orientation, et les données de a et de e la forme. Bien entendu ces différents paramètres peuvent être obtenus par les observations.
Un autre angle indiqué sur la figure, l'anomalie moyenne, verra sa définition et son utilité précisés plus bas.
Mouvement d'un corps sur une orbite de Kepler - Équation de Kepler
En astronomie, on cherche souvent à obtenir des éphémérides du mouvement des différents corps célestes, tels que les planètes du système solaire. L'obtention de celles-ci nécessite non seulement de caractériser l'orbite de ce corps à partir de ses éléments, déterminés notamment par les observations astronomiques, mais également de connaître son mouvement sur cette orbite, ce qui permettra de connaître sa position à un moment donné.
Or l'équation polaire , liant la distance r du corps par rapport au foyer de l'orbite à l'anomalie vraie θ, ne contient aucune information dynamique. C'est la deuxième loi de Kepler qui contient cette information: la constance de la vitesse aréolaire au cours du déplacement de la planète sur l'orbite implique que si l'instant de passage au périastre est pris pour origine des temps, l'aire balayée par le rayon vecteur au foyer du corps à un instant t quelconque, soit est égale à celle du « secteur d'ellipse » correspondant à l'anomalie vraie au même instant . Ceci permettrait en théorie d'obtenir une relation entre θ et t et donc la position de l'astre sur son orbite, supposée bien déterminée géométriquement, à tout instant.



Cependant, il n'est pas aisé en pratique d'exprimer l'aire d'un secteur d'ellipse d'angle θ donné, contrairement au cas d'un cercle, et le problème doit être abordée en introduisant d'autres paramètres:


- le premier est l'anomalie excentrique, notée E. Cet angle est défini en introduisant le cercle dit auxiliaire (ou exinscrit) de rayon a, le demi-grand axe, et de centre celui de l'ellipse. Si P est la position de l'astre d'anomalie vraie θ à un instant t donné, le projeté orthogonal de P sur le cercle auxiliaire dans une direction perpendiculaire au demi-grand axe est localisé par son angle au centre E (cf. figure ci-contre).
- La raison de l'introduction de cet angle est simple: comme il repère un point sur un cercle, il est nettement plus aisé de calculer l'aire d'une portion de cercle qu'il définit que de la portion d'ellipse associée à la valeur correspondante de l'anomalie vraie, qui seule possède une réalité physique. L'anomalie excentrique est un paramètre géométrique, donnant la position d'un astre sur son orbite de Kepler, plus aisé à utiliser que l'anomalie vraie θ, à laquelle elle est liée par la relation:
- .
- Il est également possible d'obtenir facilement les relations suivantes entre r, θ, et E[10]:
- ,
- ces relations montrent que la connaissance de E pour une orbite donnée (donc avec a et e connus) permet de connaître r et θ, et donc la position de l'astre sur son orbite.


- le second paramètre est l'anomalie moyenne, notée M. Il s'agit d'un paramètre dynamique, directement lié à l'aire balayée par le rayon vecteur reliant l'astre au foyer de l'orbite. La vitesse angulaire moyenne du corps sur l'orbite est appelée moyen mouvement, et est définie par , T étant la période de révolution, or d'après la deuxième loi de Kepler il vient aussitôt . Si l'origine des temps est prise au dernier passage au périastre un corps hypothétique parcourant l'orbite à vitesse angulaire constante aurait à l'instant t parcouru l'angle , qui par définition est l'anomalie moyenne. Or, d'après la loi des aires l'aire balayée par le rayon vecteur reliant le corps « réel » au foyer, entre l'instant de son dernier passage au périastre et l'instant t, est également donnée par . Par suite, l'anomalie moyenne est donc directement liée, à une constante multiplicative près, à l'aire balayée par le rayon vecteur reliant le foyer et l'astre, d'où l'intérêt de cette grandeur.




L'équation de Kepler s'obtient alors en exprimant géométriquement l'aire du secteur d'ellipse correspondant à θ donné en fonction de E: il vient (cf. article détaillé) . En éliminant ab entre cette expression de et celle obtenue avec l'anomalie moyenne, il vient aussitôt l'équation reliant le paramètre géométrique E au paramètre dynamique M, appelée équation de Kepler:


- .

Il convient de préciser qu'en dépit de sa forme, qui ne fait apparaître que des angles, l'équation de Kepler est bien une relation entre E, qui fixe la position de l'astre sur son orbite, et le temps t, l'origine des dates étant le dernier passage au périastre. Il est d'ailleurs possible de substituer dans cette équation l'expression de l'anomalie moyenne M en fonction de t et de la période de révolution T, ce qui permet d'obtenir: .

Connaissant les différents éléments de l'orbite d'un corps donné ainsi que la période de révolution de celui-ci (et donc son moyen mouvement), la détermination de l'instant de passage au périastre par les observations permet de connaître ensuite par l'équation de Kepler la position de l'astre sur son orbite à tout instant ultérieur, ou antérieur. Bien entendu, cela suppose que l'orbite réelle du corps est bien képlérienne, ce qui ne sera pas rigoureusement exact, du fait des perturbations induites par les autres corps dont l'influence a été négligée: toutefois celles-ci peuvent être prises en compte par des techniques appropriées.
Résolution de l'équation de Kepler
Depuis trois siècles, les astronomes et les mathématiciens se sont préoccupés de trouver θ(t), puisque l'observable la plus facile à repérer est la position du Soleil dans le ciel. Passer de θ à E et réciproquement est aisé. En dépit de sa simplicité apparente, l'équation de Kepler n'a pas de solution analytique connue, et sa résolution requiert donc d'utiliser soit des développements en série, soit des méthodes numériques. De nombreuses méthodes ont été proposées au cours des siècles[11], et les principales sont rappelées ci-après.
Développements usuels du mouvement képlérien
Les considérations des paragraphes précédents montrent qu'étant donnée une date t[N 15], et donc une anomalie moyenne M, l'inversion de l'équation de Kepler permet d'obtenir l'anomalie excentrique E, qui ensuite permet d'obtenir r et θ en utilisant les relations fondamentales:
- ,
et étant d'ailleurs les coordonnées de l'astre sur son orbite, par rapport au foyer de celle-ci.


Il est possible d'obtenir des développements en séries de trigonométriques en fonction de l'anomalie moyenne M (donc du temps[N 15]) de ces différentes grandeurs, dont les principaux sont donnés ci-après.
Développement de l'anomalie excentrique E
L'équation de Kepler permet d'exprimer la différence entre E et M: . Or le second membre est une fonction de M, qui est donc de par les propriétés du sinus périodique (période 2π) et impaire. Il est donc possible d'exprimer sous la forme de séries de Fourier, soit:


- , en tenant compte du caractère impair de ,


les coefficients étant donnés par:

- .

À partir de là, différentes manipulations permettent d'obtenir le développement en séries de E, dans lequel interviennent les fonctions de Bessel :








Comme , on en déduit , il est possible d'obtenir par dérivation du développement précédent celui de :



- .

Développements de cos(E) et sin(E)
Le développement de s'obtient facilement à partir de celui de E :

- .

Le développement en série de s'obtient lui en tenant compte du fait qu'il s'agit d'une fonction paire de M, de période 2π. Comme précédemment il est possible de la décomposer en séries de Fourier, faisant intervenir les termes en du fait de la parité, il vient en procédant de même que pour le développement de E:


- .

De ce développement, il est facile de déduire celui du rayon vecteur r puisque , il vient :

- ,

il est possible de voir que la valeur moyenne de r est . De la même façon il sera possible d'exprimer les coordonnées au foyer de l'axe sur son orbite, et .



Les développements en séries de et peuvent également être obtenus, en procédant de la même façon. Celui de présente un intérêt particulier pour exprimer l'anomalie vraie en fonction de M:


- .









Développements de l'anomalie vraie - équation du centre
La relation entre anomalie vraie θ et l'anomalie excentrique E est une relation entre les tangentes des angles moitié :
- .

Il est possible de montrer que cette relation peut s'écrire sous la forme d'un développement en série de la forme :

Il est possible à partir de cette relation d'exprimer θ en séries entières, il vient:
- , avec .










La substitution dans cette expression des développements de E et sin kE permet d'obtenir l'expression de , appelée équation du centre[10],[2]:

![{\displaystyle \theta -M=2\sum _{n=1}^{+\infty }{\frac {1}{n}\left(J_{n}(ne)+\sum _{k=1}^{+\infty }{\left[q^{k}\left(J_{n-k}(ne)+J_{n+k}(ne)\right)\right]}\right)\sin {nM}](https://wikimedia.org/api/rest_v1/media/math/render/svg/11b74b1277ab5e4dbdcfa19dc877c305006d3719)
Développement en série de l'excentricité e
Les développements en séries précédents, obtenus à partir des séries de Fourier, sont uniformément convergents. Les coefficients de ces séries, qui font intervenir des fonctions de Bessel de type peuvent également être exprimés sous la forme de séries entières de l'excentricité e, et les termes réarrangés de façon à obtenir des développements en séries de chacune des diverses grandeurs en fonction de e. Toutefois le réarrangement des termes peut conduire à des séries qui ne seront plus convergentes pour toutes les valeurs de l'excentricité.

Par exemple, pour l'anomalie excentrique E le développement correspondant se met sous la forme: , avec:

- , , etc.


Ces séries convergent si e < 0.662[N 16],[N 17]. L'intérêt de telles séries est que dans le cas où e est petit il est possible de tronquer le développement tout en obtenant une bonne précision[N 18].
Sources
- Danjon : cours de cosmographie de mathématiques élémentaires, 1950
- Maillard et Millet : cours de cosmographie de mathématiques élémentaires, 1956
- Wintner : analytical foundations of celestial mechanics, 1941, Princeton
- (en) Isaac Newton et Dana Densmore (trad. William H. Donahue), Newton's Principia : the central argument : translation, notes, and expanded proofs, Santa Fe, N.M, Green Lion Press, , 425 p. (ISBN 978-1-888009-01-9 et 978-1-888-00900-2, OCLC 33415300)
- Brackenridge, Key to Newton's dynamics, 1995, u California p, (ISBN 0-520-20065-9)
- (en) Niccolò Guicciardini, Reading the Principia : the debate on Newton's mathematical methods for natural philosophy from 1687 to 1736, Cambridge New York, Cambridge University Press, , 285 p. (ISBN 978-0-521-64066-4, OCLC 954623586)
- Cordani, the Kepler problem, 2003, ed Birkhauser, (ISBN 3-7643-6902-7)
- J. Keill, philosophical transactions, 26/1 (1708), 174.
- Hermann, Histoires de l'Académie Royale des Sciences, paris (1710), 519-544.
- Leibniz, Tentamen de Motuum, Acta Eruditorum (1689), 82-96
- Varignon, mémoires de l'Ac Roy de Paris, (1700), 280.
Notes et références
Notes
- L'approximation qui consiste à considérer les corps comme ponctuels est valable si leurs dimensions respectives peuvent être considérées comme petites devant la distance qui les sépare. Si l'on considère qu'ils possèdent la symétrie sphérique, ce qui est vérifié en première approximation pour de nombreux corps célestes, notamment les planètes, le champ de gravitation créé à l'extérieur de chacun des astres est le même que celui créé par un point matériel placé au centre de corps, et affecté de sa masse totale (cf. par exemple Perez, op. cit., chapitre 6, pages 77-78).
- Du moins bien sûr pour la situation où les deux corps demeurent liés entre eux, qui correspond sur le plan énergétique à une énergie mécanique (notée H) négative du système, autrement dit que l'énergie potentielle d'interaction gravitationnelle entre les deux corps, notée V (négative par convention) « l'emporte » sur l'énergie cinétique totale du système, notée T, toujours positive, évaluée dans le référentiel barycentrique. Dans ce cas il est clair qu'aucun des deux corps ne pourra aller à l'infini l'un de l'autre, puisque la condition ne sera plus vérifiée dans le cas où H<0 au-delà d'une certaine distance r telle que , V tendant vers 0 quand r croît. En revanche si H>0 ou si H=0, cette condition restera vérifiée même à l'infini.
- Ces déviations sont à la fois celles dues au caractères non-ponctuel et non-sphérique (aplatissement lié à la rotation, irrégularité, etc.) des corps célestes en jeu, mais aussi à la présence de forces non-gravitationnelles, telles que la traînée atmosphérique, ou la pression de radiation solaire pour un satellite artificiel, où les deux forces peuvent avoir une grande importance, ou encore pour une comète, en ce qui concerne la pression de radiation.
- Au besoin en tenant compte des corrections liées à la relativité générale, comme pour Mercure, cf. Tests expérimentaux de la relativité générale#Avance du périhélie de Mercure
- À cette époque, cette notion inclut également le Soleil et la Lune. Au sens moderne, cinq planètes étaient alors connues : Mercure, Vénus, Mars, Jupiter et Saturne. Le mot planète dérive de l'expression πλανήτης αστήρης planêtês astêrês « astre (ou étoile) errant », en effet celles-ci se distinguent des étoiles « fixes » par leur mouvement apparent sur la sphère céleste au cours du temps.
- Le titre original est Μαθηματική σύνταξις (Mathématikế sýntaxis), Composition mathématique. Le nom courant de cet ouvrage via d'une latinisation de l'arabe al-majisṭī (المجسطي). Cet ouvrage est disponible en trois volumes sur Internet :première partie, seconde partie et troisième partie.
- Typiquement, cette approximation consiste à négliger l'influence des autres corps pouvant être au voisinage du système des deux corps considérés. Ceci est valable si un des deux corps est de masse prépondérante par rapport à tous les autres, comme le Soleil dans le Système solaire, ou encore si les autres corps sont à des distances telles que leur influence peut être négligée : par exemple, la Terre n'exerce qu'une faible influence sur le système constitué par Neptune et ses satellites. Ceci étant, même en présence d'un corps extérieur à l'influence gravitationnelle importante il est possible de se placer dans la situation d'un problème à deux corps. Ainsi pour le système Terre-Lune, il est facile de vérifier que le Soleil exerce sur cette dernière une influence gravitationnelle près de 3,7 fois supérieure à celle de la Terre. Il pourrait alors sembler illusoire de traiter le système Terre-Lune comme un problème à deux corps. Toutefois, ceci est possible en se plaçant dans le référentiel du barycentre du système (voire de celui lié au centre de la Terre), en translation par rapport au référentiel de Copernic (héliocentrique). Si ce dernier référentiel est galiléen, ce n'est pas le cas du premier, qui est accéléré par l'attraction du Soleil, qui ne peut être négligée. Toutefois dans ce référentiel il est possible de montrer (cf. l'article force de marée) que l'influence du Soleil sur la Lune se réduit à un terme différentiel, dit de marée, bien plus faible que celui lié à l'attraction gravitationnelle Terre-Lune, laquelle varie en première approximation comme l'inverse du carré de la distance. Il sera ainsi possible de traiter le mouvement de la Lune autour de la Terre comme étant képlérien, puis de tenir compte des corrections liées aux différents termes (de marée, de non-sphéricité du potentiel…) dans un deuxième temps.
- Dans le cas le plus général, en interaction mutuelle via une force dérivant d'un potentiel V(r).
- La notation m est utilisée ici pour la masse réduite de préférence à la notation habituelle μ généralement utilisée, qui sera réservée à celle du paramètre gravitationnel standard du système, défini par , où est la masse totale du système, et G la constante gravitationnelle.
- En revanche, la différence peut être importante si la masse d'un deux corps n'est négligeable par rapport à celle de l'autre, par exemple pour une étoile binaire.
- Il s'agit là du terme général, qui peut prendre des noms particuliers suivant le corps céleste considéré : ainsi pour le mouvement de révolution de la Terre autour du Soleil, le périastre s'appellera périhélie, pour une satellite de la Terre, le périgée.
- Et non pas 7, car , contraint à être dans le plan de l'orbite, n'a que deux composantes indépendantes.
- Bien entendu, on suppose là que C#0, le cas C=0, dit dégénéré, correspondant à un mouvement rectiligne.
- Du fait de la précession des équinoxes la position de ce point, qui sert également d'origine pour l'ascension droite, varie légèrement au cours du temps, par suite il faut préciser pour quel date on donne la valeur de Ω.
- Il est rappelé que cette date a pour origine le dernier passage au périastre.
- Remarque d'histoire des sciences : ce résultat fut trouvé par Cauchy qui inventa exprès la méthode des séries entières de la variable complexe z pour trouver ce résultat, obtenant E, tel que E = et x tel que (1-x)/x = exp (2/(1-2x)), soit E = 0.662 743 419 349 182
- Remarque numérique : à l'heure actuelle, nombreux sont les astronomes qui voudraient avoir des éphémérides très précises, ne serait-ce que pour la Terre. Un exemple parmi d'autres : en climatologie, il est intéressant de regarder le cycle des glaciations, ce qui implique une bonne connaissance des paramètres de Milanković. Ceci a été calculé par l'IMCCE de Paris pour le Néogène (les 25 derniers millions d'années), ce qui a servi pour calibrer l’échelle géologique mondiale 2004. Toutefois remonter plus loin dans le passé (par exemple jusqu'à 100 Myr) requiert des méthodes rapides de résolution de l'équation de Kepler.
- Par exemple pour e < 0,1 un développement à l'ordre 6 permettra d'obtenir une précision de 10-6 sur E, cf. Duriez, op. cit., pages 171-172.




Références
- Voir par exemple: Herbert Goldstein, Charles P. Poole Jr. et John L. Safko, Classical Mechanics [détail des éditions], 2e édition, chapitre 3.
- Luc Duriez, Cours de mécanique céleste classique, université Lille-I / IMCCE, 2002, (lire en ligne), chapitre 3.
- Cf. Perez, Cours de physique : mécanique, 4e édition, Masson, Paris, 2001, chapitre 12.
- Cf. Isaac Newton, |Principes mathématiques de la Philosophie Naturelle , livre 1, édition de 1756, trad. Émilie du Châtelet, livre 1, notamment les sections II à III (numérisation e-rara).
- Ainsi selon Socrate :
.« À ce qu’assurent les doctes pythagoriciens, Calliclès, le ciel et la terre, les Dieux et les hommes sont liés entre eux par une communauté, faite d’amitié et de bon arrangement, de sagesse et d’esprit de justice, et c’est la raison pour laquelle, à cet univers, ils donnent, mon camarade, le nom de cosmos, d’arrangement, et non celui de dérangement non plus que de dérèglement. »
- Ainsi dans son Commentaire à la Physique d'Aristote, celui-ci écrit :
« Platon […] pose alors ce problème aux mathématiciens : quels sont les mouvements circulaires et uniformes et parfaitement réguliers qu'il convient de prendre pour hypothèses, afin que l'on puisse sauver les apparences que les astres errants présentent ? »
— Simplicius, Commentaires sur la physique d'Aristote
. - Voir par exemple Encyclopédia Universalis, édition 2002, volume 3, article « Astronomie et astrophysique » (ISBN 2-85229-550-4), ou encore Notionnaires Universalis - Idées, (ISBN 2-85229-562-8), Encyclopedia Universalis France SA, Paris, 2005.
- Cf. notamment à ce sujet Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions], chapitre II.
- Cf. à ce sujet Herbert Goldstein, Charles P. Poole Jr. et John L. Safko, Classical Mechanics [détail des éditions], 2e édition, chapitre 9, paragraphe 8, pour une explication détaillée montrant l'identité entre les commutateurs des matrices de rotation générant le groupe SO(4) des rotations propres dans un espace quadridimensionnel et des crochets de Poisson entre les composantes du vecteur de Runge-Lenz et du moment cinétique.
- Cf. Dumoulin et Parisot, Astronomie pratique et informatique, Masson, Paris, 1987, (ISBN 2-225-81142-3) .
- Cf. Peter Colwell, Solving Kepler's equation over three centuries, Ed. Willmann-Bell, Richmond, 1993, (ISBN 978-0943396408) .
Voir aussi
Articles connexes
- Accélération de Siacci
- Balistique extérieure
- Mouvement de Kepler selon Leibniz
- Échelle de temps en mécanique classique
- Histoire du mouvement képlérien
- Lois de Kepler
- Lois de Kepler, démonstration
- Mécanique spatiale
- Perturbation du mouvement képlérien
- Philosophiae Naturalis Principia Mathematica
- Principia et Calculus
- Problème à deux corps
- Résolution de l'équation de Kepler
- Satellite artificiel
- Théorème de Newton-Hamilton
- Vecteur de Runge-Lenz
Liens externes
- Définition et démonstration des lois de Kepler, sur le site Astrophy (en français)
- Démonstration des trois lois de Kepler et propriétés d'une ellipse












