Pôle eulérien
Pour les articles homonymes, voir Pôle et Euler (homonymie).
Cet article est une ébauche concernant la géométrie.
Vous pouvez partager vos connaissances en l’améliorant (comment ?) selon les recommandations des projets correspondants.
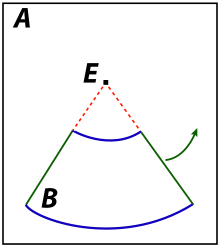
Un pôle eulérien (ou pôle d'Euler) est un centre de rotation permettant de décrire des mouvements à la surface d'une sphère. Plus précisément, en cinématique c'est un point fixe sur une surface euclidienne non plane, autour duquel tourne tout corps se déplaçant sur cette surface selon un mouvement de rotation[1]. Ainsi, un corps se déplaçant à la surface d'une sphère décrira un arc de cercle dont le centre de rotation est représenté par le pôle eulérien. Un pôle eulérien reste fixe tant que l'objet conserve le même vecteur lors de sa rotation ; ce pôle eulérien se déplacera chaque fois que le vecteur de la translation changera au cours du temps.
Le pôle eulérien doit son nom au mathématicien et physicien suisse Leonhard Euler.
Applications

La notion de pôle eulérien est utilisée dans le cadre de la tectonique des plaques[2]. Ainsi, dans le cas d'une plaque tectonique se déplaçant à la surface de la Terre, chaque point de la plaque décrit un arc de cercle; ces arcs de cercles ont en commun le même centre de rotation représenté par le pôle eulérien de la plaque tectonique. De cette théorie découle plusieurs constats et explications. Ainsi, dans le cas d'une divergence de plaques, la vitesse d'écartement des deux plaques n'est pas la même le long de la zone de divergence : plus le pôle eulérien est proche, moins la vitesse d'écartement est grande. Ceci est l'une des causes de l'existence des failles transformantes qui séparent le rift en plusieurs tronçons et qui permettent de gérer les différences de vitesse d'écartement des deux plaques. De plus, les failles transformantes sont parallèles et décrivent des arcs de cercle ayant le même centre de rotation représenté par le pôle eulérien de la plaque. Enfin, dans le cas d'une plaque pivotant sur elle-même, le pôle eulérien se situera sur la plaque.
La description mathématique du mouvement relatif des plaques fait intervenir trois paramètres seulement: la latitude et la longitude du pôle eulérien, et la vitesse de rotation. Le premier modèle (à 6 plaques) a été élaboré en 1968, un modèle plus précis à 11 plaques a été mis au point en 1978, les modèles actuels sont dérivés du modèle NUVEL-1[3].
Annexes
Article connexe
Liens externes
- (en) Convergent boundaries on Europe: A numerical approach to euler pole analysis and its applications for plate rescontruction [PDF]
- (en) Illustration du pôle eulérien dans le cadre de la tectonique des plaques
- (en) Illustration en perspective isométrique d'un pôle eulérien dans le cadre d'une sphère
Notes et références
- (en) Plate tectonics Par Allan Cox et Robert Brian Hart sur google books
- www.universalis.fr
- « Tectonique des plaques et géodésie spatiale », sur education.fr (consulté le ).