Mehanički rad
Rad je skalarna fizička veličina koja je blisko povezana s energijom, te bi se mogao definirati kao prenošenje energije s jednog tijela na drugo ili iz jednog sistema u drugi. No, takva je definicija neprikladna ako se pojam rada koristi prilikom definiranja pojma energije, što je teško izbjeći barem za pojašnjavanje apstraktnijih definicija energije (a u klasičnoj mehanici najjednostavnije je definirati energiju tijela upravo kao sposobnost tijela da izvrši rad). Umjesto toga, moguće je (a često prikladnije i iz drugih praktičnih razloga) definirati rad kao rad sile, budući da se i prenošenje energije može opisivati kao proces koji posreduju sile kojima tijela djeluju jedno na drugo.
Definicija: rad sile
Rad sile je integral tangencijalne skalarne komponente sile duž putanje njezinog hvatišta:

gdje je F iznos sile, α je kut između smjera sile i smjera gibanja (tj. brzine ) hvatišta sile (pa je "F cos α" tangencijalna skalarna komponenta sile), dok je s put hvatišta sile od točke A do točke B. [1]


To je najopćenitija definicija za rad proizvoljne sile koja može bilo kako mijenjati iznos i smjer duž putanje proizvoljnoga oblika, ako se djelovanje sile može reducirati na jednu točku (koja se zove hvatište sile); u protivnom, treba posebno promatrati komponente sile i računati njihove radove za sve točke na koje sila djeluje. Pripadajuća formula (integral) može se pisati i drugačije (kako se pokazuje kasnije u tekstu).
Specijalni slučaj "sila puta put"
Najjednostavnija formula za rad sile, koja je najbolje polazište za razumijevanje pojma rada, vrijedi npr. u slučaju kada konstantna sila djeluje na tijelo koje se translacijski (tj. bez rotacije) giba u smjeru njezina djelovanja. Tada je (kao što proizlazi i iz gornjeg integrala):


gdje je F iznos sile, dok je s pređeni put. Na taj se slučaj odnosi definicija iz osnovne škole "rad je sila puta put", koja ne uzima u obzir da je sila vektor (što je ovdje irelevantno zato što su i sila i gibanje u istom smjeru koji se ne mijenja), niti precizira da treba promatrati put hvatišta sile (jer se sve točke tijela jednako gibaju, pa može biti i "put tijela"). Npr. ako sila od 5 N vuče tijelo na putu od 3 m, ona izvrši rad W = Fs = 5 N ∙ 3 m = 15 J. Odatle se vidi da je SI mjerna jedinica za rad, džul (J), skraćenica za umnožak "Nm".
Ipak, ova jednostavna formula nije ograničena samo na pravocrtno gibanje. Ona vrijedi uvijek kada se iznos sile ne mijenja, a hvatište sile se giba točno u smjeru djelovanja sile (koji se može po volji mijenjati).
Zakon o promjeni kinetičke energije
Odnos rada i promjene energije ključna je odrednica za razumijevanje definicije rada sile. Ako je u prethodnom jednostavnom primjeru sila F jedina sila koja djeluje na tijelo mase m koje je do tada mirovalo (nije imalo kinetičke energije), tijelo na putu s ima stalnu akceleraciju a = F/m i giba se jednoliko ubrzano, te na kraju puta s = at2/2 postiže brzinu v = at. Odatle se lako vidi da je rad sile jednak kinetičkoj energiji koju tijelo dobije na tom putu:

Poopćenje tog rezultata (moglo bi se dobiti iz opće formule za rad sile, uz malo više računa) zove se zakon o promjeni kinetičke energije: rad svih sila koje djeluju na kruto tijelo jednak je promjeni njegove kinetičke energije. Pritom treba imati na umu da kinetička energija tijela ne mora biti samo translacijska (kako je opisana u gornjem jednostavnom primjeru), nego može imati i rotacijski dio (osim u slučaju čestice, tj. tijela zanemarivih dimenzija).
Objašnjenje definicije rada sile
Objašnjenje opće formule za rad sile polazi od opisane veze s energijom: formula je konstruirana upravo tako da promjena kinetičke energije bude jednaka ukupnom radu svih sila.
Značaj tangencijalne komponente sile

Prva posljedica te veze jest da sila koja djeluje na česticu okomito na smjer njezinoga gibanja (kaže se: normalna sila; primjer: centripetalna sila) ne vrši rad - jer ne mijenja iznos brzine (nego samo njezin smjer) pa ne utječe na kinetičku energiju čestice. Sila koja leži na pravcu gibanja čestice (kaže se: tangencijalna sila) vrši pozitivan rad ako je u smjeru gibanja jer povećava brzinu a time i kinetičku energiju čestice, odnosno negativan rad ako je u suprotnom smjeru od gibanja jer umanjuje kinetičku energiju. Zato se proizvoljni vektor sile prikaže kao zbroj tangencijalne i normalne sile (formalnije rečeno: rastavi na tangencijalnu i normalnu vektorsku komponentu), od čega se za izračun rada koristi samo tangencijalna. Pritom je F cos α tangencijalna skalarna komponenta vektora sile , tj. to je broj koji je jednak iznosu tangencijalne vektorske komponente sile ako je ona u smjeru gibanja, odnosno njezinom negativnom iznosu ako je u suprotnom smjeru (što daje i odgovarajući predznak rada).

Uloga hvatišta sile
Računanje rada pomoću puta koji prelazi hvatište sile (dok druge točke tijela mogu prelaziti različite puteve) također je posljedica opisane veze s energijom. Sila ku te brzine računa se translacijska kinetička energija tijela. Ako pravac djelovanja sile ne prolazi kroz centar masa, osim opisanoga učinka sila daje tijelu i kutnu akceleraciju α, pa mu mijenja i rotacijsku kinetičku energiju. Tada sila mora vršiti veći rad nego kad djeluje na centar masa, a to se dešava zato što njezino hvatište prelazi veći put nego što je put centar masa (tj. "put tijela"). Zakon poluge još zornije dokazuje da se rad sile računa pomoću puta hvatišta sile: na većem kraku dovoljna je manja sila za isti rad zato što njezino hvatište prelazi veći put.
Promjenjivu silu treba integrirati
Rad sile možemo izračunati kao umnožak dvaju brojeva (komponente F cos α i puta njezinoga hvatišta s) samo ako znamo koliko ti brojevi iznose, tj. ako se na odabranom putu tangencijalna skalarna komponenta sile ne mijenja. No, u općem slučaju sila može proizvoljno mijenjati iznos i smjer: tada se rad mora računati pomoću integrala, jer ne postoji jednostavniji postupak da se odredi prosječna vrijednost F cos α za računanje rada na nekom putu.
Tumačenje i primjer integrala rada
Postupak integriraranja može se najlakše razumjeti kao zamisao da se zbroje radovi promatrane sile po vrlo malim komadićima ukupnoga puta, tako malima da se sila na pojedinom komadiću "ne stigne" promijeniti. Naravno, sve dok je broj komadića konačan, sila će se na svakome bar malo promijeniti (ako se stalno mijenja), ali ta promjena može biti u tako dalekoj decimali da nas to u konačnom rezultatu uopće ne zanima (pa uzimamo bilo koju vrijednost s pojedinog komadića puta). Ako nije tako, podijelit ćemo put u još sitnije komadiće prije zbrajanja radova, sve dok ne dobijemo rezultat koji je točan u željenom broju znamenki (što se provjerava usporedbom s narednom još sitnijom razdiobom puta). Takav se postupak zove numeričko integriranje.
No, u mislima možemo nastaviti proces usitnjavanja u nedogled, znajući da bismo tako dobijali uzastopne rezultate sa sve većim brojem točnih znamenki. Integral je (ako postoji) onaj broj (granična vrijednost ili limes) kojemu se ti uzastopni zbrojevi sve manjih komadića rada sve više približavaju (uz dovoljno usitnjavanje puta, zbroj radova je po volji blizu granične vrijednosti). A kako pokazuje matematička analiza, tu točnu graničnu vrijednost možemo za mnoge konkretne sile izračunati na posve drugačiji način, pomoću pravila integriranja za pojedine vrste funkcija. Na primjer, potencija se integrira tako da joj se eksponent uveća za 1, i potom se podijeli s novim eksponentom. Za rastezanje elastične opruge (učvršćene na drugom kraju) potrebna je sila F = ks promjenjljivog iznosa i u smjeru rastezanja, gdje je k konstanta opruge, dok je s produljenje (potencija s na prvu), tj. put što ga je prešlo hvatište sile od nerastegnutog položaja s = 0. Da bi rastegnula oprugu za iznos A, sila će izvršiti rad:
![{\displaystyle W=\int _{0}^{A}ks\,\mathrm {d} s=k\int _{0}^{A}s\,\mathrm {d} s=k\left[{\frac {s^{2}{2}\right]_{0}^{A}={\frac {kA^{2}{2}](https://wikimedia.org/api/rest_v1/media/math/render/svg/abe00cb7c3d1d08a182f3085d1696479217ad2d8)
Na znaku integrala (stilizirani rastegnuti znak sume, najavljuje zbrajanje "beskonačno mnogo beskonačno malih pribrojnika") donja i gornja granica označavaju početnu i završnu točku puta. Slijedi iznos sile ks (kosinusa nema jer je jednak 1), što se zove podintegralna funkcija. Integral završava diferencijalom puta ds (kojega možemo smatrati "beskonačno malim komadićem puta"). (Standardna matematička analiza smatra ovakav "tehničarski" opis nekorektinim, ali noviji radovi pokazuju da ga je moguće i rigorozno opravdati.) U narednom koraku "vadi" se ispred integrala konstanta koja množi ostatak podintegralne funkcije, a potom se s1 integrira u s2/2. U zadnjem koraku uvrste se, umjesto s, granice integriranja: najprije gornja granica A, od čega se oduzme isti izraz sa uvršenom donjom granicom (ovdje 0, pa se ne piše).
Opis rada skalarnim produktom
Skalarnim množenjem dvaju vektora dobija se skalar koji je jednak umnošku njihovih iznosa i kosinusa kuta među njima. Ako je sila konstantnog iznosa i smjera, a smjer pravocrtnog gibanja njezinog hvatišta zatvara stalni kut α sa smjerom sile, rad se može zapisati na dva načina:

Drugi izraz označava skalarni produkt vektora sile i vektora pomaka (engleski naziv množenja dot product potječe od točke koja se piše među vektorima). Pomak je usmjerena dužina koja "ide" od početne do završne točke puta na putanji hvatišta sile (opisuje koliko se i u kojemu smjeru ta točka "pomakla"). Jednakost navedenih izraza je očigledna iz definicije skalarnog produkta, budući da je u opisanom slučaju iznos pomaka jednak putu s. No, može se dokazati da formula sa skalarnim produktom sile i pomaka vrijedi i za proizvoljni oblik putanje, uz uvjet da sila ne mijenja iznos i smjer.

Za proizvoljni oblik putanje hvatišta, potrebno je najprije matematički opisati krivulju duž koje se ta točka giba. Gibanje točke u cjelosti je opisano ako za svaki trenutak znademo njezine koordinate, npr. x(t), y(t) i z(t) u pravokutnom Kartezijevom sistemu gdje ih možemo smatrati skalarnim komponentama vektora položaja (radij-vektora) te točke. Vektor položaja je usmjerena dužina kojoj je početak u ishodištu sistema a kraj (strelica) "prati" točku po putanji. Koordinate i vektor položaja često se pišu bez eksplicitne oznake ovisnosti o vremenu, jer se ona kod gibanja točke i tako podrazumijeva.

Kod takvog opisa gibanja, prikladnije je za vektor pomaka iz neke točke 1 u točku 2 koristiti oznaku (ako znamo da označava razliku odnosno promjenu) jer ona eksplicitno pokazuje da se pomak dobija oduzimanjem pripadnih vektora položaja: , tj. da pomak možemo promatrati kao "promjenu položaja". Duljina putanje (pređeni put s) na krivulji može biti znatno veća od iznosa vektora pomaka . No, ako se promatraju sve manji pomaci (vremenski interval između promatranih položaja "teži" prema nuli; na skici je ilustriran početak graničnog procesa) iznosi puta i pomaka postaju sve više jednaki. Jednakost graničnih vrijednosti možemo zapisati pomoću diferencijala: . Stoga se integral iz opće definicije za rad proizvoljne sile na proizvoljnom putu može kraće zapisati pomoću skalarnog produkta:







Uzimajući u obzir da je brzina neke točke derivacija njezinog vektora položaja po vremenu (pa je ), može se taj integral prevesti u integral po vremenu:


Podintegralna funkcija je snaga sile. Budući da se snaga definira kao derivacija rada po vremenu, jasno je da rad mora biti jednak integralu snage po vremenu.

Opaska: pređeni put ili pomak?
U hrvatskim udžbenicima obično se rad opisuje pomoću puta hvatišta sile. Nasuprot tome, u američkima [2] se obično polazi od pomaka (možda zato što nemaju jednostavne riječi za "put", nego koriste "duljinu staze"). Engleski jezik nema ni jednostavne riječi za "hvatište" sile, nego koristi "točku u kojoj sila djeluje na tijelo", pa se u površnim tekstovima o radu često previđa uloga hvatišta sile.
U općoj formuli za rad promjenjljive sile duž proizvoljne putanje svejedno je (kao što je pokazano kod gornjeg integrala) da li se promatra diferencijal puta ili vektora položaja (tzv. diferecijalni pomak), jer su im iznosi isti, a integriranje je krivuljni integral duž putanje hvatišta sile. No, u specijalnim slučajevima, ponekad može jedan pristup omogućiti upotrebu jednostavnije formule nego drugi.
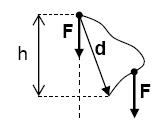
Korištenje vektora pomaka olakšava račun ako se kod gibanja po krivulji promatra rad sile konstantnog iznosa i smjera (kakva je npr. težina tijela). Na gornjoj skici desno, težište tijela spušta se po krivudavom putu (zbog istovremenog djelovanja drugih sila). Pritom težina izvrši rad (što je općenito poznati rezultat, jednak negativnoj promjeni potencijalne energije). A taj se rezultat najlakše dobiva kao skalarni umnožak težine i pomaka , budući da je .





Nasuprot tome, ako sila ima samo konstantan iznos, a njezin promjenjljivi smjer se točno podudara sa smjerom gibanja hvatišta (ili je točno u suprotnom smjeru), rad se najlakše računa kao umnožak iznosa sile i puta hvatišta (s tim da je rad negativan ako su smjerovi suprotni). Primjerice, ako tijelo kliže po podlozi po putanji proizvoljnog oblika, na njega djeluje trenje u suprotnom smjeru od smjera klizanja, a iznos trenja je konstantan ako se na tome putu ne mijenjaju pritisak tijela na podlogu ni svojstva podloge. Tada se rad trenja jednostavno dobiva kao . Drugi primjer (na donjoj skici desno) je rotacija tijela, npr. neke poluge, oko čvrste osovine; rotaciju najefikasnije ubrzava sila koja djeluje okomito na polugu (dakle, u smjeru gibanja hvatišta duž kružnice). Ako je iznos sile konstantan na prikazanom putu (kružni luk), rad sile je



Rad momenta sile
Prilikom rotacije tijela oko čvrste osi, često se rad opisuje kao rad momenta sile, umjesto kao rad sile. Dakako, to je isti rad, a formula se lako prevodi iz jednog oblika u drugi. U primjeru s rotiranjem poluge, kružni luk može se opisati pomoću polumjera kružnice i kuta zakreta (izraženog u radijanima) kao . Ako se to uvrsti u gornji izraz za rad sile koja gura polugu, dobiva se , budući da je iznos momenta sile koji zakreće polugu (sila puta krak).




Odatle slijedi da se rad konstantnog momenta sile računa pomoću kuta zakreta (u radijanima) kao:
- .

U slučaju da moment sile oko čvrste osi mijenja iznos, jasno je da navedenu formulu treba pretvoriti u integral iznosa momenta po kutu zakreta. Još općenitije, moguće je (ali nije uobičajeno u svakodnevnim tehničkim primjenama) računati rad promjenjljivog momenta sile i u slučaju da tijelo nije na čvrstoj osovini, pa mu vektor kutne brzine može mijenjati smjer. Tada se u integralu može koristiti skalarni produkt vektora momenta sile i vektorskog diferencijalnog zakreta.
Budući da je kod rotacije oko čvrste osi uobičajeno rad računati samo pomoću iznosa momenta sile, potrebno je dopisati negativni predznak radu u slučaju da moment djeluje u suprotnom smjeru od kutne brzine koju tijelo već ima. To bi, naime, u gornjem primjeru značilo da sila na polugu djeluje u suprotnom smjeru od smjera gibanja njezinog hvatišta (koji na skici nije naznačen). Tada sila, odnosno njezin moment, umanjuju kinetičku energiju tijela (koja se za rotacijsko gibanje računa po formuli , gdje je moment inercije tijela oko čvrste osi, dok je kutna brzina).



Izvori
- ↑ I. Levanat: Fizika za TVZ - Kinematika i dinamika Tehničko veleučilište u Zagrebu (2010)
- ↑ Young H. D., Freedman R. A., Sears and Zemansky University Physics, Addison-Wesley, San Francisco (2004)
Vanjske veze
- Glumac, Zvonko (2006.): Klasična mehanika Arhivirano 2013-11-01 na Wayback Machine-u, Sveučilište u Osijeku
 (PDF)
(PDF) - Prirodno-matematički fakultet Univerziteta u Nišu: Rad, energija, snaga (PDF)
- WWU: Work and Kinetic Energy Arhivirano 2012-05-30 na Wayback Machine-u, Bellingham: Western Washington University (en)
- Light and Matter: Work: the transfer of mechanical energy Arhivirano 2016-12-26 na Wayback Machine-u (en)