Nota: Para a tecla de computador, veja
Delete .
Nota: Para Diodo emissor de luz, veja
LED .
No cálculo vectorial , o del é um operador diferencial representado pelo símbolo nabla
(
∇
)
.
{\displaystyle \left(\nabla \right).}
Derivada em função do espaço Seja um campo escalar diferenciável
f
{\displaystyle f}
x
→
.
{\displaystyle {\vec {x}.}
∀
n
∈
N
∗
D
n
f
=
∂
f
∂
x
→
n
{\displaystyle \forall n\in \mathbb {N_{*} \quad D_{n}f={\frac {\partial f}{\partial {\vec {x}_{n}
Em altas ordens A derivada em função do espaço em alta ordem é representada por uma multiplicação simbólica como no exemplo abaixo (de 2ª ordem):
∀
n
,
m
∈
N
∗
2
D
n
D
m
f
=
D
n
(
D
m
f
)
=
∂
(
∂
f
∂
x
→
m
)
∂
x
→
n
=
∂
2
f
∂
x
→
n
∂
x
→
m
{\displaystyle \forall n,m\in \mathbb {N_{*} \!^{2}\quad D_{n}D_{m}f=D_{n}\left(D_{m}\,f\right)={\frac {\partial \left({\frac {\partial f}{\partial {\vec {x}_{m}\right)}{\partial {\vec {x}_{n}={\frac {\partial ^{2}f}{\partial {\vec {x}_{n}\partial {\vec {x}_{m}
Essa operação é comutativa de acordo com o teorema de Clairaut-Schwarz , então, do exemplo acima pode-se afirmar que:
D
n
D
m
f
=
D
m
D
n
f
{\displaystyle D_{n}D_{m}f=D_{m}D_{n}f}
Quando os índices são iguais podemos fazer uma exponenciação simbólica.
∀
k
,
n
∈
N
∗
2
D
n
k
f
=
D
n
D
n
(
…
)
D
n
⏟
k
f
=
∂
k
f
∂
x
→
n
k
{\displaystyle \forall k,n\in \mathbb {N_{*} \!^{2}\quad D_{n}^{k}f=\underbrace {D_{n}D_{n}\left(\ldots \right)D_{n} _{k}f={\frac {\partial ^{k}f}{\partial {\vec {x}\,_{n}^{k}
Em outras coordenadas ortogonais Para todo sistema de coordenadas ortogonal
q
→
{\displaystyle {\vec {q}
D
n
f
=
∂
f
q
→
n
∂
q
→
n
{\displaystyle D_{n}f={\frac {\partial f}{\vec {q}_{n}\partial {\vec {q}_{n}
Operações Seja um campo escalar
f
{\displaystyle f}
campo vectorial
F
→
{\displaystyle {\vec {F}
x
→
.
{\displaystyle {\vec {x}.}
Gradiente Visualização da interpretação de gradiente - o campo escalar domínio está em preto e a imagem, vectorial, em azul. Em cada ponto, o gradiente aponta para o vizinho que representar o maior incremento infinitesimal. O gradiente é um campo vectorial e seu domínio é um campo escalar.
∇
f
=
∑
i
D
i
f
⋅
e
^
i
{\displaystyle \nabla f=\sum ^{i}D_{i}f\cdot {\hat {e}_{i}
Portanto o gradiente de
f
{\displaystyle f}
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
f
=
⟨
∂
f
∂
x
,
∂
f
∂
y
,
∂
f
∂
z
⟩
{\displaystyle \nabla f=\left\langle {\frac {\partial f}{\partial x},{\frac {\partial f}{\partial y},{\frac {\partial f}{\partial z}\right\rangle }
O processo de computação do gradiente é revertido pelo integral de linha de acordo com o teorema do gradiente .
Δ
f
=
f
Q
−
f
P
=
∫
γ
P
γ
Q
∇
f
⋅
d
γ
→
{\displaystyle \Delta f=f_{Q}-f_{P}=\int _{\gamma _{P}^{\gamma _{Q}\nabla f\cdot {\vec {d\gamma }
Identidades do gradiente
∇
(
f
+
g
)
=
∇
f
+
∇
g
{\displaystyle \nabla (f+g)=\nabla f+\nabla g}
∇
(
f
g
)
=
f
∇
g
+
g
∇
f
{\displaystyle \nabla (fg)=f\nabla g+g\nabla f}
Derivada direcional A derivada direcional é um escalar que representa a derivada dum campo escalar (no caso, f) ao longo de um vector (no caso abaixo,
u
→
{\displaystyle {\vec {u}
∀
u
→
∇
u
→
f
=
u
→
⋅
∇
f
{\displaystyle \forall {\vec {u}\quad \nabla \!_{\vec {u}\,f={\vec {u}\cdot \nabla f}
Em coordenadas cartesianas,
u
→
⋅
∇
f
=
u
x
∂
f
∂
x
+
u
y
∂
f
∂
y
+
u
z
∂
f
∂
z
{\displaystyle {\vec {u}\cdot \nabla f=u_{x}\;{\frac {\partial f}{\partial x}+u_{y}\;{\frac {\partial f}{\partial y}+u_{z}\;{\frac {\partial f}{\partial z}
Em coordenadas cilíndricas,
u
→
⋅
∇
f
=
u
r
∂
f
∂
r
+
u
θ
r
∂
f
∂
θ
−
u
θ
2
r
+
u
z
∂
f
∂
z
{\displaystyle {\vec {u}\cdot \nabla f=u_{r}\;{\frac {\partial f}{\partial r}+{\frac {u_{\theta }{r}\;{\frac {\partial f}{\partial \theta }-{\frac {u_{\theta }^{2}{r}+u_{z}\;{\frac {\partial f}{\partial z}
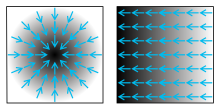
Divergência A divergência (ou divergente ) é um campo escalar igual ao traço (álgebra linear) da matriz jacobiana dum campo vectorial.
∇
∙
F
→
=
∑
i
D
i
F
→
i
=
Sp
J
x
→
F
→
{\displaystyle \nabla \bullet {\vec {F}=\sum ^{i}D_{i}{\vec {F}_{i}={\mbox{Sp}\mathbf {J} _{\vec {x}^{\vec {F}
Portanto a divergência de
F
→
{\displaystyle {\vec {F}
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
∙
F
→
=
∂
F
→
x
∂
x
+
∂
F
→
y
∂
y
+
∂
F
→
z
∂
z
{\displaystyle \nabla \bullet {\vec {F}={\frac {\partial {\vec {F}_{x}{\partial x}+{\frac {\partial {\vec {F}_{y}{\partial y}+{\frac {\partial {\vec {F}_{z}{\partial z}
Denomina-se convergência o inverso aditivo da divergência.
Identidades da divergência
∇
⋅
(
F
→
+
G
→
)
=
∇
⋅
F
→
+
∇
⋅
G
→
{\displaystyle \nabla \cdot ({\overrightarrow {F}+{\overrightarrow {G})=\nabla \cdot {\overrightarrow {F}+\nabla \cdot {\overrightarrow {G}
Rotacional A rotacional (ou rotor ) é o determinante entre três bases padrões, três componentes do vector del e três componentes dum campo vectorial.
∇
×
F
→
=
∑
i
D
i
F
→
×
e
^
i
=
∑
i
j
k
ε
i
j
k
⋅
e
^
i
⋅
D
j
F
→
k
{\displaystyle \nabla \times {\vec {F}=\sum _{i}D_{i}{\vec {F}\times {\hat {e}_{i}=\sum _{ijk}\varepsilon _{ijk}\cdot {\hat {e}_{i}\cdot D_{j}{\vec {F}_{k}
Pelo teorema de Laplace o rotor de
F
→
{\displaystyle {\vec {F}
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
×
F
→
=
⟨
D
y
F
→
z
−
D
z
F
→
y
,
D
z
F
→
x
−
D
x
F
→
z
,
D
x
F
→
y
−
D
y
F
→
x
⟩
{\displaystyle {\begin{aligned}\nabla \times {\vec {F}={\bigg \langle }&D_{y}{\vec {F}_{z}-D_{z}{\vec {F}_{y},\\&D_{z}{\vec {F}_{x}-D_{x}{\vec {F}_{z},\\&D_{x}{\vec {F}_{y}-D_{y}{\vec {F}_{x}{\bigg \rangle }\\\end{aligned}
Identidades do rotacional
∇
×
(
F
→
+
G
→
)
=
∇
×
F
→
+
∇
×
G
→
{\displaystyle \nabla \times ({\overrightarrow {F}+{\overrightarrow {G})=\nabla \times {\overrightarrow {F}+\nabla \times {\overrightarrow {G}
Operações combinadas Das nove possíveis simples combinações entre os operadores gradiente, divergente e rotor duas a duas, quatro são impossíveis, duas são triviais nulas (sempre resultam em zero) – restam três operadores dos quais um recebe um nome especial, que é o divergente do gradiente denominado laplaciano .
…gradiente de
f
{\displaystyle f}
…divergente de
F
→
{\displaystyle {\vec {F}
…rotor de
F
→
{\displaystyle {\vec {F}
Gradiente do…
(indefinido)
Gradiente do divergente
(indefinido)
Divergente do…
Laplaciano escalar
(indefinido)
(trivial nulo)
Rotor do…
(trivial nulo)
(indefinido)
Rotor do rotor
Todas essas três operações definidas e não-triviais são relacionadas pela seguinte identidade:
(
∑
i
∇
2
F
→
i
)
⏟
l
a
p
l
a
c
i
a
n
o
v
e
c
t
o
r
i
a
l
+
(
∇
×
∇
×
F
→
)
⏟
r
o
t
o
r
d
o
r
o
t
o
r
=
(
∇
(
∇
∙
F
→
)
)
⏟
g
r
a
d
i
e
n
t
e
d
o
d
i
v
e
r
g
e
n
t
e
{\displaystyle \underbrace {\left(\sum ^{i}\nabla ^{2}{\vec {F}_{i}\right)} _{laplaciano\,vectorial}+\underbrace {\left(\nabla \times \nabla \times {\vec {F}\right)} _{rotor\,do\,rotor}=\underbrace {\left(\nabla \left(\nabla \bullet {\vec {F}\right)\right)} _{gradiente\,do\,divergente}
Laplaciano O laplaciano escalar é o divergente do gradiente ou o traço (álgebra linear) da matriz hessiana dum campo escalar.
∇
2
f
=
∇
∙
∇
f
=
∑
i
D
i
2
f
=
Sp
H
x
→
f
{\displaystyle \nabla ^{2}f=\nabla \bullet \nabla f=\sum ^{i}D_{i}^{2}f={\mbox{Sp}\mathbf {H} _{\vec {x}^{f}
Onde:
D
i
2
f
=
D
i
(
D
i
f
)
=
∂
2
f
∂
x
→
i
2
{\displaystyle D_{i}^{2}f=D_{i}\left(D_{i}f\right)={\frac {\partial ^{2}f}{\partial {\vec {x}_{i}^{2}
O laplaciano de
f
{\displaystyle f}
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
2
f
=
∂
2
f
∂
x
2
+
∂
2
f
∂
y
2
+
∂
2
f
∂
z
2
{\displaystyle \nabla ^{2}f={\frac {\partial ^{2}f}{\partial x^{2}+{\frac {\partial ^{2}f}{\partial y^{2}+{\frac {\partial ^{2}f}{\partial z^{2}
Outras combinações
∇
⋅
(
f
F
→
)
=
(
∇
f
)
⋅
F
→
+
f
(
∇
⋅
F
→
)
{\displaystyle \nabla \cdot (f{\overrightarrow {F})=(\nabla f)\cdot {\overrightarrow {F}+f(\nabla \cdot {\overrightarrow {F})}
∇
×
(
f
F
→
)
=
(
∇
f
)
×
F
→
+
f
(
∇
×
F
→
)
{\displaystyle \nabla \times (f{\overrightarrow {F})=(\nabla f)\times {\overrightarrow {F}+f(\nabla \times {\overrightarrow {F})}
∇
⋅
(
F
→
×
G
→
)
=
G
→
⋅
(
∇
×
F
→
)
−
F
→
⋅
(
∇
×
G
→
)
{\displaystyle \nabla \cdot ({\overrightarrow {F}\times {\overrightarrow {G})={\overrightarrow {G}\cdot (\nabla \times {\overrightarrow {F})-{\overrightarrow {F}\cdot (\nabla \times {\overrightarrow {G})}
∇
(
F
→
⋅
G
→
)
=
(
G
→
⋅
∇
)
F
→
+
(
F
→
⋅
∇
)
G
→
+
G
→
×
(
∇
×
F
→
)
+
F
→
×
(
∇
×
G
→
)
{\displaystyle \nabla ({\overrightarrow {F}\cdot {\overrightarrow {G})=({\overrightarrow {G}\cdot \nabla ){\overrightarrow {F}+({\overrightarrow {F}\cdot \nabla ){\overrightarrow {G}+{\overrightarrow {G}\times (\nabla \times {\overrightarrow {F})+{\overrightarrow {F}\times (\nabla \times {\overrightarrow {G})}
∇
×
(
F
→
×
G
→
)
=
(
G
→
⋅
∇
)
F
→
−
G
→
(
∇
⋅
F
→
)
−
(
F
→
⋅
∇
)
G
→
+
F
→
(
∇
⋅
G
→
)
{\displaystyle \nabla \times ({\overrightarrow {F}\times {\overrightarrow {G})=({\overrightarrow {G}\cdot \nabla ){\overrightarrow {F}-{\overrightarrow {G}(\nabla \cdot {\overrightarrow {F})-({\overrightarrow {F}\cdot \nabla ){\overrightarrow {G}+{\overrightarrow {F}(\nabla \cdot {\overrightarrow {G})}
∇
×
(
∇
×
F
→
)
=
∇
(
∇
⋅
F
→
)
−
∇
2
F
→
{\displaystyle \nabla \times (\nabla \times {\overrightarrow {F})=\nabla (\nabla \cdot {\overrightarrow {F})-\nabla ^{2}{\overrightarrow {F}
f
{\displaystyle f}
F
→
{\displaystyle {\overrightarrow {F}
∇
×
(
∇
f
)
=
0
→
{\displaystyle \nabla \times (\nabla f)={\overrightarrow {0}
f
{\displaystyle f}
F
→
{\displaystyle {\overrightarrow {F}
∇
⋅
(
∇
×
F
→
)
=
0
{\displaystyle \nabla \cdot (\nabla \times {\overrightarrow {F})=0}
f
{\displaystyle f}
F
→
{\displaystyle {\overrightarrow {F}
Laplaciano vectorial Cada componente do laplaciano vectorial representa o laplaciano do componente respectivo do campo vectorial argumento.
∇
2
F
→
=
∑
i
∇
2
F
→
i
⋅
e
^
i
=
∑
i
j
D
j
2
F
→
i
⋅
e
^
i
=
∑
i
Sp
H
x
→
F
→
i
⋅
e
^
i
{\displaystyle \nabla ^{2}{\vec {F}=\sum ^{i}\nabla ^{2}{\vec {F}_{i}\cdot {\hat {e}_{i}=\sum ^{ij}D_{j}^{2}{\vec {F}_{i}\cdot {\hat {e}_{i}=\sum ^{i}{\mbox{Sp}\mathbf {H} _{\vec {x}^{\vec {F}_{i}\cdot {\hat {e}_{i}
Onde:
D
j
2
F
→
i
=
D
j
(
D
j
F
→
i
)
=
∂
2
F
→
i
∂
x
→
j
2
{\displaystyle D_{j}^{2}{\vec {F}_{i}=D_{j}\left(D_{j}{\vec {F}_{i}\right)={\frac {\partial ^{2}{\vec {F}_{i}{\partial {\vec {x}_{j}^{2}
Portanto o laplaciano vectorial de
F
→
{\displaystyle {\vec {F}
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
2
F
→
=
⟨
∂
2
F
→
x
∂
x
2
+
∂
2
F
→
x
∂
y
2
+
∂
2
F
→
x
∂
z
2
,
∂
2
F
→
y
∂
x
2
+
∂
2
F
→
y
∂
y
2
+
∂
2
F
→
y
∂
z
2
,
∂
2
F
→
z
∂
x
2
+
∂
2
F
→
z
∂
y
2
+
∂
2
F
→
z
∂
z
2
⟩
{\displaystyle {\begin{aligned}\nabla ^{2}{\vec {F}={\Bigg \langle }&{\frac {\partial ^{2}{\vec {F}_{x}{\partial x^{2}+{\frac {\partial ^{2}{\vec {F}_{x}{\partial y^{2}+{\frac {\partial ^{2}{\vec {F}_{x}{\partial z^{2},\\&{\frac {\partial ^{2}{\vec {F}_{y}{\partial x^{2}+{\frac {\partial ^{2}{\vec {F}_{y}{\partial y^{2}+{\frac {\partial ^{2}{\vec {F}_{y}{\partial z^{2},\\&{\frac {\partial ^{2}{\vec {F}_{z}{\partial x^{2}+{\frac {\partial ^{2}{\vec {F}_{z}{\partial y^{2}+{\frac {\partial ^{2}{\vec {F}_{z}{\partial z^{2}{\Bigg \rangle }\\\end{aligned}
Vector del Apesar de se tratar dum grave caso de abuso de notação, é muito comum se encontrar a seguinte definição de vector del :
∇
→
=
∑
i
q
^
i
h
i
⋅
∂
∂
x
→
i
{\displaystyle {\vec {\nabla }=\sum ^{i}{\frac {\hat {q}_{i}{h_{i}\cdot {\frac {\partial }{\partial {\vec {x}_{i}
…onde
h
i
{\displaystyle h_{i}
q
^
i
.
{\displaystyle {\hat {q}_{i}.}
Em coordenadas cartesianas Em coordenadas cartesianas , em que
h
i
=
1
{\displaystyle h_{i}=1}
∇
→
=
i
^
∂
∂
x
+
j
^
∂
∂
y
+
k
^
∂
∂
z
.
{\displaystyle {\overrightarrow {\nabla }={\hat {i}{\partial \over \partial x}+{\hat {j}{\partial \over \partial y}+{\hat {k}{\partial \over \partial z}.}
Em coordenadas cilíndricas Em coordenadas cilíndricas em que
h
ρ
=
h
z
=
1
,
h
φ
=
ρ
,
{\displaystyle h_{\rho }=h_{z}=1,\ h_{\varphi }=\rho ,}
∇
→
=
ρ
^
∂
∂
ρ
+
φ
^
ρ
∂
∂
φ
+
z
^
∂
∂
z
{\displaystyle {\overrightarrow {\nabla }={\hat {\rho }{\frac {\partial }{\partial \rho }+{\frac {\hat {\varphi }{\rho }{\frac {\partial }{\partial \varphi }+{\hat {z}{\frac {\partial }{\partial z}
Em coordenadas esféricas Em coordenadas esféricas , em que
h
r
=
1
,
h
θ
=
r
,
h
φ
=
r
s
e
n
θ
,
{\displaystyle h_{r}=1,\ h_{\theta }=r,\ h_{\varphi }=r{\rm {sen}\theta ,}
∇
→
=
r
^
∂
∂
r
+
θ
^
r
∂
∂
θ
+
φ
^
r
s
e
n
θ
∂
∂
φ
{\displaystyle {\overrightarrow {\nabla }={\hat {r}{\frac {\partial }{\partial r}+{\frac {\hat {\theta }{r}{\frac {\partial }{\partial \theta }+{\frac {\hat {\varphi }{r\,{\rm {sen}\,\theta }{\frac {\partial }{\partial \varphi }
Derivada direcional com o vector del Com o vector del, a derivada direcional pode ser redefinida como a combinação linear de
u
→
{\displaystyle {\vec {u}
∇
→
:
{\displaystyle {\vec {\nabla }:}
∇
→
u
→
=
∑
i
u
→
i
⋅
∂
∂
x
→
i
=
u
→
⋅
∇
→
{\displaystyle {\vec {\nabla }_{\vec {u}=\sum ^{i}{\vec {u}_{i}\cdot {\frac {\partial }{\partial {\vec {x}_{i}={\vec {u}\cdot {\vec {\nabla }
Em três dimensões no espaço carteseano
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
→
=
ı
^
⋅
∂
∂
x
+
ȷ
^
⋅
∂
∂
y
+
k
^
⋅
∂
∂
z
=
⟨
∂
∂
x
,
∂
∂
y
,
∂
∂
z
⟩
{\displaystyle {\vec {\nabla }={\hat {\imath }\cdot {\frac {\partial }{\partial x}+{\hat {\jmath }\cdot {\frac {\partial }{\partial y}+{\hat {k}\cdot {\frac {\partial }{\partial z}=\left\langle {\frac {\partial }{\partial x},{\frac {\partial }{\partial y},{\frac {\partial }{\partial z}\right\rangle }
E:
∇
→
u
→
=
u
→
x
⋅
∂
∂
x
+
u
→
y
⋅
∂
∂
y
+
u
→
z
⋅
∂
∂
z
{\displaystyle {\vec {\nabla }_{\vec {u}={\vec {u}_{x}\cdot {\frac {\partial }{\partial x}+{\vec {u}_{y}\cdot {\frac {\partial }{\partial y}+{\vec {u}_{z}\cdot {\frac {\partial }{\partial z}
Divergência com o vector del A divergência passa a ser a combinação linear (não o produto escalar ! – veja abaixo) entre o vector del e o campo vectorial em questão:
∇
→
⋅
F
→
=
∑
i
∂
∂
x
→
i
⋅
F
→
i
{\displaystyle {\vec {\nabla }\cdot {\vec {F}=\sum ^{i}{\frac {\partial }{\partial {\vec {x}_{i}\,\cdot \,{\vec {F}_{i}
Laplaciano com o vector del A combinação linear do vector del consigo mesmo forma o operador laplaciano:
∇
→
2
=
∇
→
⋅
∇
→
{\displaystyle {\vec {\nabla }^{2}={\vec {\nabla }\cdot {\vec {\nabla }
Em três dimensões no espaço carteseano
x
→
=
⟨
x
,
y
,
z
⟩
{\displaystyle {\vec {x}=\left\langle x,y,z\right\rangle }
∇
→
2
=
∂
2
∂
x
2
+
∂
2
∂
y
2
+
∂
2
∂
z
2
{\displaystyle {\vec {\nabla }^{2}={\frac {\partial ^{2}{\partial x^{2}+{\frac {\partial ^{2}{\partial y^{2}+{\frac {\partial ^{2}{\partial z^{2}
Rotacional com o vector del Daí admitimos outro abuso de notação para definir rotacional:
∇
→
×
F
→
=
det
[
e
^
∇
F
→
]
=
det
[
e
^
x
e
^
y
e
^
z
∂
∂
x
∂
∂
y
∂
∂
z
F
→
x
F
→
y
F
→
z
]
{\displaystyle {\vec {\nabla }\times {\vec {F}=\det {\begin{bmatrix}\mathbf {\hat {e} &\nabla &{\vec {F}\end{bmatrix}=\det {\begin{bmatrix}{\hat {e}_{x}&{\hat {e}_{y}&{\hat {e}_{z}\\{\frac {\partial }{\partial x}&{\frac {\partial }{\partial y}&{\frac {\partial }{\partial z}\\{\vec {F}_{x}&{\vec {F}_{y}&{\vec {F}_{z}\\\end{bmatrix}
Nesse caso, de certa forma, temos sim um produto vectorial entre o vector del e o campo vectorial.
Riscos do abuso de notação O uso do vector del pode gerar muita confusão – por exemplo, a multiplicação envolvendo vector del e não é comutativa, distributiva nem euclideana; também o vector del não tem magnitude nem direcção. Esses fatores podem induzir iniciantes ao erro.
Alternativas ao símbolo nabla O símbolo nabla foi introduzido por William Hamilton e rapidamente assimilado pela comunidade científica. Ainda assim, alguns autores preferem escrever a sigla de cada operador apresentado acima ao invés de usar o nabla:
∇
f
=
grad
f
{\displaystyle \nabla f={\mbox{grad}f}
∇
u
→
f
=
u
→
⋅
grad
f
{\displaystyle \nabla \!_{\vec {u}\,f={\vec {u}\cdot {\mbox{grad}f}
∇
∙
F
→
=
div
F
→
{\displaystyle \nabla \bullet {\vec {F}={\mbox{div}{\vec {F}
No caso do rotacional as siglas podem fazer referências aos termos anglófonos como "curl " ou "rotor ":
∇
×
F
→
=
curl
F
→
=
rot
F
→
{\displaystyle \nabla \times {\vec {F}={\mbox{curl}{\vec {F}={\mbox{rot}{\vec {F}
Já o laplaciano pode ser representado pela letra grega delta maiúscula em vez do tradicional nabla elevado ao quadrado.
∇
2
f
=
div
grad
f
=
Δ
f
{\displaystyle \nabla ^{2}f={\mbox{div}{\mbox{grad}f=\Delta f}
∇
2
F
→
=
Δ
F
→
{\displaystyle \nabla ^{2}{\vec {F}=\mathbf {\Delta {\vec {F} }
Notação de Einstein Na notação de Einstein substituimos a forma
D
J
{\displaystyle D_{J}
∂
J
{\displaystyle \partial _{J}
vector del
∇
=
[
∂
J
]
.
{\displaystyle \mathbf {\nabla } =\left[\partial _{J}\right].}
Seja
φ
{\displaystyle \varphi }
F
=
[
f
J
]
{\displaystyle \mathbf {F} =\left[f_{J}\right]}
X
=
[
x
J
]
{\displaystyle \mathbf {X} =\left[x_{J}\right]}
grad
φ
=
∂
i
φ
⋅
e
^
i
{\displaystyle {\mbox{grad}\,\varphi =\partial _{i}\varphi \cdot {\hat {e}_{i}
div
F
=
∂
i
f
i
{\displaystyle {\mbox{div}\,\mathbf {F} =\partial _{i}f_{i}
curl
F
=
|
e
^
∇
F
|
=
ε
i
j
k
e
^
i
∂
j
f
k
{\displaystyle {\mbox{curl}\,\mathbf {F} ={\begin{vmatrix}\mathbf {\hat {e} &\mathbf {\nabla } &\mathbf {F} \end{vmatrix}=\varepsilon _{ijk}\,{\hat {e}_{i}\partial _{j}f_{k}
Δ
φ
=
∂
i
2
φ
{\displaystyle \Delta \varphi =\partial \,_{i}^{2}\varphi }
Δ
F
=
Δ
f
i
⋅
e
^
i
{\displaystyle \mathbf {\Delta F} =\Delta f_{i}\cdot {\hat {e}_{i}
A derivada direcional fica denotada por:
u
⋅
grad
φ
{\displaystyle \mathbf {u} \cdot {\mbox{grad}\,\varphi }
upgrade
Ver também Ligações externas 


































































![{\displaystyle \mathbf {\nabla } =\left[\partial _{J}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4cae7fe2d52a3e107ed745a007faa74e0d368686)

![{\displaystyle \mathbf {F} =\left[f_{J}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bff77eee2c65abcb8c8988ea19220bb2ace52a1b)
![{\displaystyle \mathbf {X} =\left[x_{J}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/273b2471b9a5ff0c0e69f77e9c259785461c51e0)





